技术 | 水泥原料无人值守输送系统及其应用
某公司7500t/d水泥熟料生产线辅料堆场有5台堆取料机,用于转运输送4种水泥原料,一直采用人工调车加半远程手动操作输送物料,作业效率与生产安全完全取决于操作人员的熟练程度与操作方式。通过对设备进行智能化改造,建立水泥原料无人值守输送系统,实现了水泥生产原料的科学存储、精准堆取、安全供应及原料输送的自动化、无人化,达到了减员增效的目的。
水泥原料无人值守输送系统主要由堆取料机精准定位系统、激光雷达扫描系统、安全避碰防护系统、PLC集群控制系统等组成。
堆取料机精准定位系统通过准确计算堆取料机作业位置和调车位置,精准定位堆取料机位置,为堆取料机三维扫描提供数据基础;激光雷达扫描系统通过扫描计算物料体积和空间位置,实现物料的可视化和数字化管理,同时结合精准定位系统保证堆取料机之间的安全距离;安全避碰防护系统可提前预知并规避设备的碰撞隐患,提高设备使用安全性;PLC集群控制系统对水泥原料堆场的设备使用进行集中控制,达到水泥原料输送系统无人值守的目标。
2.1 堆取料机精准定位系统
(1)行走定位
该公司水泥原料输送系统示意见图1。水泥原料堆场中,原煤堆料机、辅料堆料机、辅料取料机1、辅料取料机2采用倍加福RFID与编码器融合定位技术,原煤取料机采用迈测L2激光测距传感器和编码器融合定位技术,实现堆取料机行走的精准定位。
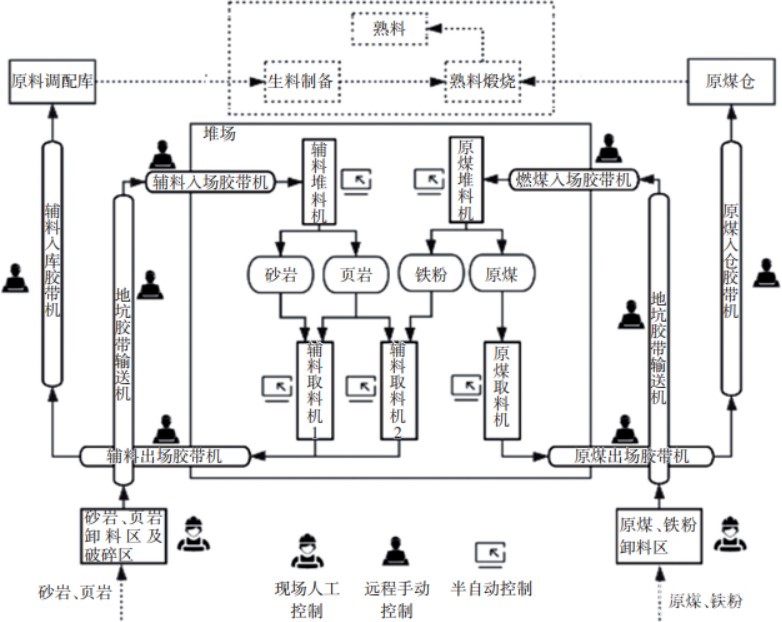
图1 水泥原料输送系统示意
堆取料机RFID行走定位基于无线射频识别技术,沿堆取料机行走轨道方向,每隔固定测量距离安装若干RFID定位标签,行走堆取料机通过安装于车轮附近的RFID读写器,读取当前标签的位置信息,修正堆取料机位置编码器数值,实现堆取料机的精准定位。RFID定位的优点在于使用简单,稳定可靠;定位标签数量越多,安装间隔距离越小,定位精度越高。RFID定位的缺点在于安装施工量大,定位标签数量越多,成本则越高。
(2)俯仰定位
堆取料机的俯仰定位一般采用编码器和倾角测量仪相融合的方式,倾角测量仪较多采用基于MEMS技术的三轴加速度计和三轴陀螺仪,测量仪安装方便,测量精度可达0.1°。此外,亦有采用基于RTK技术及差分GPS技术进行俯仰定位的方式,但这两项技术的工程应用成本较高,且与倾角测量仪相比,安装部署较为不便。
该公司堆取料机俯仰角的测量采用倍加福F99-Fusion惯性测量单元和编码器相结合的方案。
2.2 激光雷达扫描系统
堆取料机三维扫描技术主要包括视觉识别技术和激光雷达扫描技术。堆取料机视觉识别技术主要通过双目视觉矫正方式实现堆取料机三维空间建模。该技术利用不同拍摄角度的图片或视频,通过立体匹配的方式获取堆取料机三维信息,可有效利用现场已有监控视频信息进行堆取料机三维空间建模,成本较激光雷达扫描技术低,但受限于拍摄角度定位差异,其三维空间建模精度不高。此外,由于该技术需对视频信息展开大量的特征匹配计算,三维空间建模时间长,不能满足堆取料自动作业的高实时性要求。
激光雷达扫描技术实施方式有三维激光雷达扫描和二维激光雷达扫描,三维激光雷达扫描一般基于当前较为流行的“HDDM+升级型高分辨率距离测量”技术,是比较理想的三维空间建模技术,但价格高昂,不利于实际项目部署。
综上,在水泥原料堆场物料三维空间建模应用上,二维激光雷达扫描是目前较为适宜的选择,其价格合理,技术成熟稳定,被大量项目采用。
二维激光雷达扫描主要包括:固定云台扫描、顶部扫描小车扫描、随堆取料机机构运行扫描等三个方面,需经激光雷达扫描数据处理、堆取料机运行数据采集、时间同步、激光雷达坐标系和堆场坐标系坐标矩阵转换、三维坐标数据网格规格化及空间插值等,最后生成物料可视化结果。
(1)采集数据和数据同步
激光雷达扫描数据是一组一定角度范围内测距数据的集合,测量角度范围越大、角度分辨率越高,则采集数据量越大。因此,激光雷达扫描数据的传输一般采用以太网可靠性和实时性均较强的TCP-Socket通信传输技术,PLC通信一般采用Mod⁃bus-TCP、TCP-Socket等方式。与激光雷达扫描数据相比,存储于PLC内的堆取料机运行数据量小、通信速度快,因此,激光雷达扫描数据需与堆取料机的运行数据进行时间同步匹配,同步方式较多采用数据加时间戳及缓存读取等方式。
(2)坐标矩阵转换
由于激光雷达扫描数据是一组角度数据和距离数据的集合,属于极坐标数据,且位于雷达的局部坐标系,需要结合堆取料机的行走、俯仰、回转等数据进行坐标矩阵转换,将局部坐标系下的极坐标形式雷达数据转换为堆场全局坐标系下的笛卡尔坐标形式的数据。极坐标数据见图2,数据同步变换见图3,笛卡尔坐标变换见式(1),堆场坐标矩阵变换见式(2),数据参数含义见表1。

(3)“点云”网格化及空间插值
经坐标转换及滤波处理完成后,激光雷达扫描数据变成了三维笛卡尔坐标系下“点云”数据。此“点云”数据在二维平面下的投影杂乱、不均匀,不便于后续堆取料机自动作业算法的实施和其三维可视化的呈现,需进行网格规格化(以右手坐标系为例,Y方向为物料高度方向),即,将XOZ平面分割成等尺寸的均匀网格,长宽皆为dxz,初始高度皆为0(y=0),经算法处理后,散乱的“点云”数据在XOZ平面上被放置在网格交点上,“点云”数据网格化一般有反距离平均、邻域搜索等算法。网格化插值计算见图4。
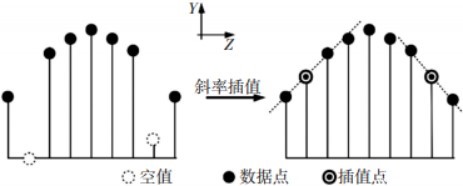
图4 网格化插值计算
2.3 安全避碰防护系统
设备安全避碰一般包括基于硬件的被动避碰和基于软件的主动避碰两种方式。
2.3.1被动式避碰
设备的被动式避碰,主要是指利用安装在设备上的限位开关、碰撞开关、超声波测距仪等检测设备碰撞状态,被动执行报警、停机及退回等操作,属于较低级的安全避碰措施。该公司原料堆场输送系统采用超声波和拉绳开关等设备,实现堆取料机与物料、堆取料机与堆取料机间的被动式避碰。
2.3.2主动式避碰
在被动式避碰的基础上,设备的主动式避碰是指利用精准定位技术、三维空间建模信息、设备空间尺寸信息等,计算设备与设备、设备与物料将要发生碰撞的特征点位置,并给出设备避碰策略控制指令,实现设备在自动作业过程的安全避碰。主动式避碰主要包括以下几种实施方法:
(1)平面投影法
对堆取料机进行地面投影,将三维避碰问题转化为二维避碰问题。该方法计算简单,在避碰精度要求不高的情况下,具有一定的实用性,但不适用于该公司输送系统的高精度避碰要求。
(2)空间机构学计算法
将堆取料机简化为近似空间线段,计算此空间线段的位置数据。一般情况下,该技术的避碰准确性高于平面投影法,但由于其忽略了堆取料机的外形、厚度、尺寸和不规则特性,在某种情况下,避碰效果较差。
(3)包围盒检测法
相比于前两种方法,包围盒检测法(特别是矩形包围盒检测法)较好地考虑了堆取料机的厚度、宽度等尺寸信息,一定程度提高了堆取料机避碰效果,但该方法同样未考虑堆取料机外形的不规则性,在某种特定工况下,其避碰效果不佳。
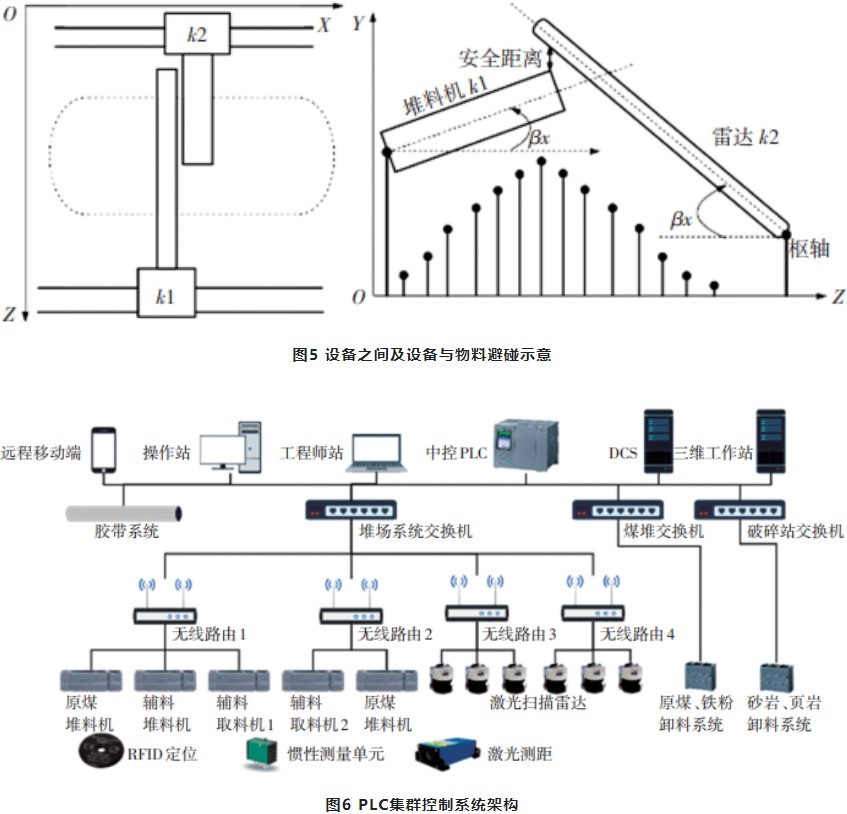
综上分析,本系统采用了对堆取料机大臂进行网格化的创新方法,并对堆取料机进行了完整的空间数学建模,采用预先测算堆取料机与堆取料机、堆取料机与物料间的三维距离信息的方式,提前预知并规避碰撞隐患,属于比较超前且智能的安全避碰措施,极大地提高了设备使用的安全性。设备之间及设备与物料避碰示意见图5。
2.4 PLC集群控制系统
PLC集群控制系统是指通过计算机调度算法对PLC进行集中控制,将原料堆场所有设备看作是一个集群,从而将5台堆取料机设备的20多种调车方式从手动控制变为自动控制。公司原料输送PLC控制系统采用西门子S7-1200系列产品,通过现场的无线网络,经网关连接到中控S7-1500PLC系统。PLC集群控制系统架构见图6。
水泥原料输送无人值守系统是一种全自动、智能堆取料系统,该系统在该公司水泥生产线成功应用,实现了堆取料机自动识别料堆、自动寻址定位、自动作业,操作员仅需在中控室监控整个料场的设备自动运行情况即可。
本文以三维扫描数据流为基础,建立了水泥原料输送系统模型,经过现场实际测试,实现了大型水泥厂生产工艺中水泥原料输送的自动化、无人化,提高了水泥生产的智能化水平和生产效率。
作者:蔡照海
来源:《湖州槐坎南方水泥有限公司》
微信公众号:备件网(关注查询更多资讯)
(本文来源网络,若涉及版权问题,请作者来电或来函联系!)

 浙公网安备
33010802003693号
浙公网安备
33010802003693号